
- Embalaje - Logística - Manipulación
- Manutención y Elevación
- Pinza de prensión neumática
- Hangzhou FOUK Mechanical Technology Co., Ltd.
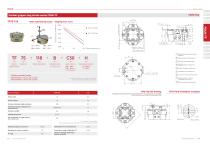
Pinza de prensión de 4 mandíbulas TF75-118neumáticaparalelapara robot industrial

Añadir a mis favoritos
Añadir al comparador
Características
- Accionamiento
- neumática
- Tipo
- paralela
- Número de mandíbulas
- de 4 mandíbulas
- Aplicaciones
- para robot industrial
- Características y opciones
- 4 dedos, protegida
- Fuerza de agarre
370 N, 386 N
- Carrera
10 mm
(0,394 in)
Descripción
Opciones de configuración:
B: Ventilación en la parte inferior
C30: Longitud de la barra de empuje
H: Resistencia a altas temperaturas
La pinza neumática de cuatro dedos de centrado, con la estructura de soporte de carga en forma de T, soporta diferentes placas de empuje.Su muelle de temple tiene una vida útil de más de 500.000 veces. La fuerza de agarre de la pinza de cuatro dedos es uniforme, lo que permite agarrar objetos de forma estable y evitar daños.
---
Catálogos
Otros productos de Hangzhou FOUK Mechanical Technology Co., Ltd.
Pneumatic Grippers
































Búsquedas asociadas
- Prensor neumático
- Prensor paralelo
- Prensor de 2 mandíbulas
- Prensor para robot industrial
- Prensor de 3 mandíbulas
- Prensor angular
- Prensor concéntrico
- Prensor ligero
- Prensor de largo recorrido
- Pinza de prensión de 4 mandíbulas
- Prensor 2 dedos
- Pinza de prensión 3 dedos
- Pinza de prensión hidráulica
- Pinza de prensión 4 dedos
- Módulo de prensión
- Pinza de prensión flexible
- Pinza de prensión resistente al agua
- Pinza de prensión industrial
- Módulo de prensión neumático
- Módulo de prensión para robot colaborativo
* Los precios no incluyen impuestos, gastos de entrega ni derechos de exportación. Tampoco incluyen gastos de instalación o de puesta en marcha. Los precios se dan a título indicativo y pueden cambiar en función del país, del coste de las materias primas y de los tipos de cambio.